如何 伪造/篡改 USB 摄像头
0. Introduction
为什么要做这样魔幻的事情呢?因为我在想,深度学习到底能不能安全地部署?会不会有人能很轻易地攻击部署好的深度学习模型?
除了科普性的介绍,这篇文章后面也会介绍如何用 Buildroot 构建 bootloader,定制 Linux 内核,根文件系统,如何用 C 读取 /dev/video0 的数据,并且把 YUYV422 格式转换成 OpenCV 的 YV12,RGB,最终 JPEG 编码实时推送 MJPEG 视频流。项目源码放在了 github 上,可以在最后的参考文献找到链接。
30 年前 (1989) 深度学习还只能费力地部署在台式机上,最终却也只能做个手写体识别;
大约 15 年前 NVIDIA 发布了 cudnn (2007) 从此开启了在 GPU 上训练模型的时代;
随后 Intel 也发布了 AVX-256 指令集 (2008) ,帮助加速深度学习在 CPU 上的训练、部署;

大概 10 年前 Xilinx 发布了 ZYNQ 多核异构 ARM + FPGA 系列 (2011),帮助深度学习走向低功耗;

到了 2015 年,Tensorflow (Google) 和 Pytorch (Facebook) 陆续发布,从此深度学习的门槛极大地降低,各行各业都开始学习深度学习。
4 年前 ST 发布了 STM32 Cube AI (2018),随后 Google 又发布了 Tensorflow Lite (2019),大家又开始热衷于在内存、存储、算力都很有限的 MCU 上部署深度学习;
到了 2021 年,国内又掀起了一股无人驾驶造车的浪潮,突然深度学习开始大面积地部署。

那么问题来了,深度学习是不是真的已经安全稳定到,可以部署在无人驾驶这样非常注重安全,几乎不允许出错的领域呢?以目标检测系统为例,我是不是可以在不被发现的情况下恶意篡改模型的输出,让它检测出本不存在的物体,或者让它没法检测现实存在的物体 (e.g. 路人,红绿灯) ?
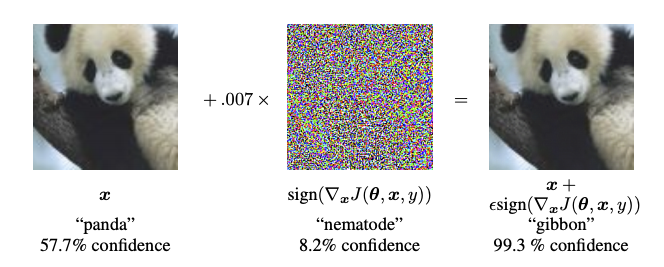
当然,这个问题并不是没有人考虑过,从 2015 年第一个针对图像分类模型的攻击开始 (FGSM),接下来的 6-7 年,陆续有1万多篇 paper 尝试去改变输入的图像,在不被人察觉到原始图像被篡改的情况下,恶意修改模型的输出。
比如下面的经典非法案例,下面左边的大熊猫,加上了中间肉眼看不出来的干扰,右边还是一只大熊猫,然而深度学习会把它识别为长臂猿。
但是过了这么多年,如今深度学习大量被部署的时代,我们有几千上万种攻击深度学习的方式,却几乎没有看到现实生活中,因为被人恶意攻击而造成模型失效的例子,这是为什么呢?
- 大部分攻击方式需要获取被攻击模型的训练集,而现实应用中,在连拿到别人的模型都很困难的情况下,更别谈要获取别人的数据集了;
- 很多攻击没法实现实时性,攻击前需要在 GPU 上经过一段很长时间的优化,然而现实世界模型大都是实时运行的,等到在 GPU 上跑出来攻击结果,早已物是人非;
- 一些勉强能实现接近实时的攻击方式依赖于梯度 (Gradients),而只有在模型训练的时候会计算梯度,部署运行 (Inference) 的时候不会计算梯度;
- 即使,假设我们很幸运能拿到别人的数据集,又很巧妙的实现了实时的攻击,甚至还不需要梯度,又会发现真的有这个必要吗?
如果我们能直接干扰实际系统的输入图像,通常意味着我们已经获得别人操作系统的访问权限,既然已经可以访问别人的系统了,何必费劲心力去增加干扰,直接 sudo halt (关机) 不是就解决问题了吗?
很多 paper 中的攻击方式,通常是自己的电脑上有一个模型,然后想办法自己攻击自己,但是在面临残酷的现实的时候,很多条件都没法实际实现。于是我在思考一个问题,如果我们没有别人的数据集,没有办法访问别人的系统,没法根据梯度实时更新攻击,是不是还能实时地攻击深度学习模型,并且不被人发现呢?
最终我得到了下面的这个结论:

我们其实是可以把攻击放到传感器端的,终于说到了文章标题,例如直接伪造、篡改摄像头数据。虽然深度学习训练集、模型、操作系统都是几乎无法访问的,但是传感器通常是直接暴露在外的,因为需要采集外界信息。
如同密码学领域经典的中间人攻击 (Man-in-the-Middle Attack),我们能不能在摄像头和系统的中间连接处施加干扰?答案是可以的,比如下面 Windows 识别到了一个普普通通的摄像头,但是其实这个摄像头本身就是一个已经被恶意攻击的摄像头。我们不需要拿到操作系统的访问权限,就可以攻击深度学习模型,因为我们的攻击是针对传感器 (摄像头) 的。
科普性质的介绍就到此结束了,面临严苛的现实,却还希望能实时攻击实际系统,接下来就是需要经历曲折的 Engineering。
大概思路是这样的:我们需要一块 Linux 开发板,一端 USB Host 连接摄像头,拿到原始摄像头的数据,另一端 USB OTG 模拟一个摄像头,把篡改后的数据再转发出去。这样从 PC 上看,它只检测到有一个 USB 摄像头连接上来了,却没法分辨图像输入是不是收到了篡改。

添加图片注释,不超过 140 字(可选)
1. 读取 Linux 摄像头数据 (V4L2)
首先,我们需要读取原始摄像头的数据。常见的摄像头数据包格式有2种 (MJPEG 和 YUYV 422),我们可以用 v4l2-ctl 命令看看自己的摄像头支持哪些格式:
$ v4l2-ctl --list-formats -d /dev/video0
ioctl: VIDIOC_ENUM_FMT
Type: Video Capture
[0]: 'MJPG' (Motion-JPEG, compressed)
[1]: 'YUYV' (YUYV 4:2:2)
现在的 USB 摄像头一般是 2 种都支持的,其中 YUYV 422 是没有经过压缩的数据,所以视频的质量通常都不是特别高 (360p),毕竟要传输实时、高清、未压缩的视频流,可能超过了 USB 的最大传输速率 (USB2.0 High Speed 480Mbps);MJPEG 从名字也可以看出来,自然就是经过 JPEG 压缩后的图像,压缩后数据量大大减少,所以可以用来传输高清视频流 (720p, 1080p)。
1.1 YUYV422 图像格式
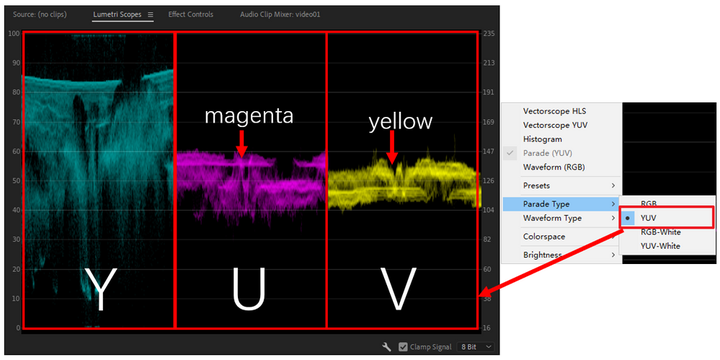
这里简单解释一下 YUV 颜色空间,通常我们熟悉的是 RGB (红绿蓝),那么为什么摄像头用的是 YUV 呢?因为人的眼睛对亮度变化 (Y) 比较敏感,但是对色度变化 (U, V) 却不是那么敏感 ,所以为了节省视频传输空间,从 YUYV 422 命名也可以看出来,我们对亮度 (Y4) 进行了 2 倍的采样,而色度 (U2 V2) 采样虽然少一些,人眼是看不出来区别的。
下面就是 YUYV 422 的格式,可以看到 Y 出现了 4 次 (Y0, Y1, Y2, Y3),U 出现了 2 次 (U0, U1),V 出现了 2 次 (V0, V1),这也就是命名里面 422 的由来。不过下面其实是 4 个像素点的数据,所以 4 个像素点一共花费了 (4 +2+2) = 8 byte 的数据,平均每个像素点就花费了 8 / 4 = 2 byte 数据,相比 RGB 一个像素点需要3个字节 (RGB 各一个),YUYV 只需要 2 个字节,节省了 1 /3 空间。知道了 USB 摄像头的像素格式,接下来就是读取摄像头的图片数据了。

在 linux 系统,视频设备都是以 /dev/video 的形似挂载的,我们需要用 V4L2 (Video for Linux version 2) 驱动读取里面的图像,这里我主要参考下面的链接,并在其基础上支持了 YUYV422,RGB888,MJPEG 格式:
1.2 V4L2 读取图像
大致分为3个部分:打开摄像头,配置摄像头,内存映射,读取图像数据。
首先,我们可以打开摄像头,获取一个文件描述符 (file descriptor),因为 Linux 设备都是以文件的形式挂载的,所以这和打开一个文件几乎是一样的。
fd = open(v4l2_devname, O_RDWR);
if (fd == -1)
{
perror("Opening video device");
return 1;
}
接下来我们需要配置摄像头的像素格式,分辨率,像素的格式我们需要用到的是 YUYV 和 MJPEG。当然,如果使用 OpenCV 写出 RGB888 的格式到 v4l2loopback 虚拟设备,也是可以读取的。
struct v4l2_format fmt = {0};
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmt.fmt.pix.width = 1280;
fmt.fmt.pix.height = 720;
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV;
// fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_MJPEG;
// fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_RGB24;
fmt.fmt.pix.field = V4L2_FIELD_NONE;
if (-1 == xioctl(fd, VIDIOC_S_FMT, &fmt))
{
perror("Setting Pixel Format");
return 1;
}
配置好摄像头格式之后,我们需要做内存映射,把摄像头的图像内存映射到指针,这样我们后面就可以读取数据了,比如下面把摄像头的内存映射到一个 uint8_t* 的 buffer 里面:
uint8_t *buffer;
struct v4l2_requestbuffers req = {0};
req.count = 1;
req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
req.memory = V4L2_MEMORY_MMAP;
if (-1 == xioctl(fd, VIDIOC_REQBUFS, &req))
{
perror("Requesting Buffer");
return 1;
}
struct v4l2_buffer buf = {0};
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = 0;
if(-1 == xioctl(fd, VIDIOC_QUERYBUF, &buf))
{
perror("Querying Buffer");
return 1;
}
buffer = mmap (NULL, buf.length, PROT_READ | PROT_WRITE, MAP_SHARED, fd, buf.m.offset);
最后,我们就可以读取摄像头的数据了:
struct v4l2_buffer buf = {0};
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = 0;
if(-1 == xioctl(fd, VIDIOC_QBUF, &buf))
{
perror("Query Buffer");
return 1;
}
if(-1 == xioctl(fd, VIDIOC_STREAMON, &buf.type))
{
perror("Start Capture");
return 1;
}
fd_set fds;
FD_ZERO(&fds);
FD_SET(fd, &fds);
struct timeval tv = {0};
tv.tv_sec = 2;
int r = select(fd+1, &fds, NULL, NULL, &tv);
if(-1 == r)
{
perror("Waiting for Frame");
return 1;
}
if(-1 == xioctl(fd, VIDIOC_DQBUF, &buf))
{
perror("Retrieving Frame");
return 1;
}
但是读出来的数据在 uint8_t* buffer 的指针里,我们还需要把它转换为 OpenCV 的矩阵,方便之后做图像处理:
cv::Mat cv_img;
if (format == 0 ){
// Decode YUYV
cv::Mat img = cv::Mat(cv::Size(image_width, image_height), CV_8UC2, buffer);
cv::cvtColor(img, cv_img, cv::COLOR_YUV2RGB_YVYU);
}
if (format == 1) {
// Decode MJPEG
cv::_InputArray pic_arr(buffer, image_width * image_height * 3);
cv_img = cv::imdecode(pic_arr, cv::IMREAD_UNCHANGED);
}
if (format == 2) {
// Decode RGB3
cv_img = cv::Mat(cv::Size(image_width, image_height), CV_8UC3, buffer);
}
cv::imshow("view", cv_img);
这样我们就顺利读取到 /dev/video 的数据,并且转换成 OpenCV 的格式了,剩下的就是把图像编码转发到虚拟摄像头了。完整代码可以在 Github 上找到:
2. USB Gadget 虚拟摄像头
我们需要一个支持 USB Gadget 模拟摄像头设备的 Linux 内核。如果是树莓派4的话,内核默认是支持的,其他的开发版可能就需要重新编译 Linux 内核了。
2.1 Buildroot 构建 Linux 内核、根文件系统
Buildroot 可以帮我们快速构建引导 (u-boot),Linix 内核,和根文件系统。如果是使用 buildroot 编译内核的话,需要打开 UVC V4L2 摄像头支持:
$ make linux-menuconfig
--> Device Drivers
Multimedia Support -->
Media USB Adapters -->
[M] USB Video Class
V4L platform devices -->
其次,我们需要打开 USB Gadget Configfs,这样就可以配置 USB 模拟摄像头了 (g_webcam 已经被淘汰了,不建议使用):
-> Device Drivers
-> USB support (USB_SUPPORT [=y])
-> USB Gadget Support (USB_GADGET [=m])
-> USB Gadget functions configurable through configfs (USB_CONFIGFS [=m])
这样我们就可以在 linux 启动后加载内核模块了:
# modprobe libcomposite dwc2
# mount | grep configfs
configfs on /sys/kernel/config type configfs (rw,relatime)
当然,如果是想完全伪造一个不存在的设备,也可以使用 v4l2loopback,不过这个是在 buildroot 的根文件系统里选择:
$ make menuconfig
-> Target packages
-> Audio and video applications
-> v4l2loopback (BR2_PACKAGE_V4L2LOOPBACK [=y])
配置编译好 Linux 内核之后,接下来就可以启动 linux 进行后续的配置了。当然,不要忘了在 Linux 设备树里打开USB OTG:
/*
*usb_port_type: usb mode. 0-device, 1-host, 2-otg.
*usb_detect_type: usb hotplug detect mode. 0-none, 1-vbus/id detect, 2-id/dpdm detect.
*usb_detect_mode: 0-thread scan, 1-id gpio interrupt.
*usb_id_gpio: gpio for id detect.
*usb_det_vbus_gpio: gpio for id detect. gpio or "axp_ctrl";
*usb_wakeup_suspend:0-SUPER_STANDBY, 1-USB_STANDBY.
*/
&usbc0 {
device_type = "usbc0";
usb_port_type = <0x2>;
usb_detect_type = <0x1>;
usb_detect_mode = <0>;
usb_id_gpio = <&pio PB 8 GPIO_ACTIVE_HIGH>; /*unused */
enable-active-high;
usb_det_vbus_gpio = <&pio PB 9 GPIO_ACTIVE_HIGH>;/*unused */
usb_wakeup_suspend = <0>;
usb_serial_unique = <0>;
usb_serial_number = "20080411";
rndis_wceis = <1>;
status = "okay";
};
2.2 Configfs 配置虚拟摄像头
Configfs 可以让我们在用户态 (userspace) 配置 linux 内核驱动,比如我们可以配置 USB OTG 成串口,访问 linux 控制台;或者配制成以太网口,利用 USB OTG 共享网络,当然,接下来要做的是配置成 USB 摄像头,这部分只要照着文档配置就可以了。
比如我们可以任意改变 USB 的厂家,设备名:
echo 0x1d6b > /sys/kernel/config/usb_gadget/pi4/idVendor
echo 0x0104 > /sys/kernel/config/usb_gadget/pi4/idProduct
echo 0x0100 > /sys/kernel/config/usb_gadget/pi4/bcdDevice
echo 0x0200 > /sys/kernel/config/usb_gadget/pi4/bcdUSB
echo 0xEF > /sys/kernel/config/usb_gadget/pi4/bDeviceClass
echo 0x02 > /sys/kernel/config/usb_gadget/pi4/bDeviceSubClass
echo 0x01 > /sys/kernel/config/usb_gadget/pi4/bDeviceProtocol
mkdir /sys/kernel/config/usb_gadget/pi4/strings/0x409
echo 100000000d2386db > /sys/kernel/config/usb_gadget/pi4/strings/0x409/serialnumber
echo "Samsung" > /sys/kernel/config/usb_gadget/pi4/strings/0x409/manufacturer
echo "Fake Camera" > /sys/kernel/config/usb_gadget/pi4/strings/0x409/product
mkdir /sys/kernel/config/usb_gadget/pi4/configs/c.2
mkdir /sys/kernel/config/usb_gadget/pi4/configs/c.2/strings/0x409
echo 500 > /sys/kernel/config/usb_gadget/pi4/configs/c.2/MaxPower
echo "UVC" > /sys/kernel/config/usb_gadget/pi4/configs/c.2/strings/0x409/configuration
mkdir /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0
mkdir -p /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/control/header/h
ln -s /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/control/header/h /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/control/class/fs
当然,也可以设置虚拟摄像头的数据格式,这里主要有2个,也就是前面提到的:未压缩的 (uncompressed) 和压缩的(MJPEG):
# MJPEG 720p
mkdir -p /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/streaming/mjpeg/m/720p
cat <<EOF > /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/streaming/mjpeg/m/720p/dwFrameInterval
5000000
EOF
cat <<EOF > /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/streaming/mjpeg/m/720p/wWidth
1280
EOF
cat <<EOF > /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/streaming/mjpeg/m/720p/wHeight
720
EOF
cat <<EOF > /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/streaming/mjpeg/m/720p/dwMinBitRate
29491200
EOF
cat <<EOF > /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/streaming/mjpeg/m/720p/dwMaxBitRate
29491200
EOF
cat <<EOF > /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/streaming/mjpeg/m/720p/dwMaxVideoFrameBufferSize
1843200
EOF
未压缩的 YUYV(低分辨率):
# YUYV 360p
# mkdir -p /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/streaming/uncompressed/u/360p
# cat <<EOF > /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/streaming/uncompressed/u/360p/dwFrameInterval
# 666666
# 1000000
# 5000000
# EOF
# cat <<EOF > /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/streaming/uncompressed/u/360p/wWidth
# 1280
# EOF
# cat <<EOF > /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/streaming/uncompressed/u/360p/wHeight
# 720
# EOF
# cat <<EOF > /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/streaming/uncompressed/u/360p/dwMinBitRate
# 29491200
# EOF
# cat <<EOF > /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/streaming/uncompressed/u/360p/dwMaxBitRate
# 29491200
# EOF
# cat <<EOF > /sys/kernel/config/usb_gadget/pi4/functions/uvc.usb0/streaming/uncompressed/u/360p/dwMaxVideoFrameBufferSize
# 1843200
# EOF
完整的配置可以在这里找到:
3. YUV 转码 MJPEG 推流
现在,我们可以读取 /dev/video0 的图像数据,也定制了一个 Linux 内核可以模拟 USB 摄像头,最后一步当然就是修改视频流了,为了实现实时的性能,这里需要手动转码。这里有2条路径:

不做图像处理直接编码转发视频流 YUYV — YUV3 — JPEG

OpenCV 图像处理后编码转发视频流 YUYV — RGB888 — YV12 — YUV3 — JPEG
有些我们可以用 OpenCV 和 libJPEG 转换,但图上虚线部分是需要我们手写转换格式的,因为 libJPEG 的输入要求是 YUV3 的格式,而 OpenCV 输出是 YV12,所以需要实现 YUYV --> YUV3 和 YV12 --> YUV3。
3.1 YUYV to YUV3
前面提到,YUYV 422 是因为人眼对色度不那么敏感,所以为了节省带宽,UV 只用了一半的存储空间;而 YUV3 其实数据内容是一模一样的,只是为了方便处理,把 YUV 做成了等长,大致看起来格式是这样的:
// YUV422 (2 pixels)
| Y0 U0 Y1 V0 | Y2 U1 Y3 V1 |
// YUV 3 (2 pixels)
| Y0 U0 V0 | Y1 U0 V0 | Y2 U1 V1 | Y3 U1 V1 |
可以看到,YUV3 其实就是为了让 YUV 等长,而把 UV 重复了一遍,所以当我们转换图片的一行可以这么操作:
for (i = 0, j = 0; i < cinfo.image_width * 2; i += 4, j += 6) {
//input strides by 4 bytes, output strides by 6 (2 pixels)
tmprowbuf[j + 0] = input[offset + i + 0]; // Y (unique to this pixel)
tmprowbuf[j + 1] = input[offset + i + 1]; // U (shared between pixels)
tmprowbuf[j + 2] = input[offset + i + 3]; // V (shared between pixels)
tmprowbuf[j + 3] = input[offset + i + 2]; // Y (unique to this pixel)
tmprowbuf[j + 4] = input[offset + i + 1]; // U (shared between pixels)
tmprowbuf[j + 5] = input[offset + i + 3]; // V (shared between pixels)
}
也就是浪费一些存储空间,把 Y1 U1 Y2 V1 重新排序成 Y1 U1 V1 | Y2 U2 V2 的格式。
3.2 YV12 to YUV3
这两个格式之间的转换就略微有些麻烦了,前面 YUYV 到 YUV3 的转换其实只是做了个冗余的重新排序,因为它俩一张图片的内存排布方式是一样的,都是按顺序存储 YUV,然而 YV12 就略微复杂,它是先存储所有的 Y,然后再存储所有的 U,最后再存储所有的 V,在内存里的排布看起来是这样的:
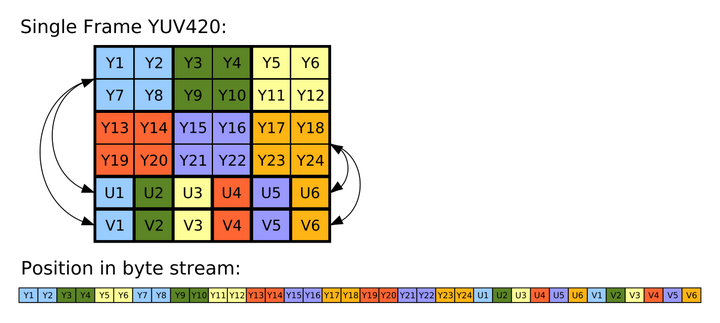
这有点类似于图片在 CPU 和 GPU 的 Channel 排布不同,从 NWHC 转换到 NCWH。
for (i = 0, j = 0; i < cinfo.image_width; i += 1, j += 3) {
//input strides by 3 bytes, output strides by 1 (2 pixels)
tmprowbuf[j + 0] = input[i + cinfo.image_width * cinfo.next_scanline];
// Jump through all Y (cinfo.image_width * cinfo.image_height)
tmprowbuf[j + 1] = input[i / 2 + cinfo.image_width * cinfo.image_height + (cinfo.image_width / 2) * (cinfo.next_scanline / 2)];
// Jump through all Y and U ((cinfo.image_width / 2) * (cinfo.image_height / 2))
tmprowbuf[j + 2] = input[i / 2 + cinfo.image_width * cinfo.image_height + (cinfo.image_width / 2) * (cinfo.image_height / 2) + (cinfo.image_width / 2) * (cinfo.next_scanline / 2)];
}
上面宽高分别除以了2是因为前面提到,人眼对色度 (UV) 不敏感,所以一个 2x2 的 4 个像素点,其实用的同一个 1 个 U 来存储,所以 UV 在内存宽高的占用,各是 Y 的 1/2。
3.3 JPEG 编码
当然,如果是简单的图片叠加,其实我们也可以不解码,直接做图像处理,但是这对原始图片的尺寸有一些要求,后期优化性能可以考虑直接对 JPEG 做图像处理。这里简单介绍一下 JPEG 编码,使用 libjpeg 编码。
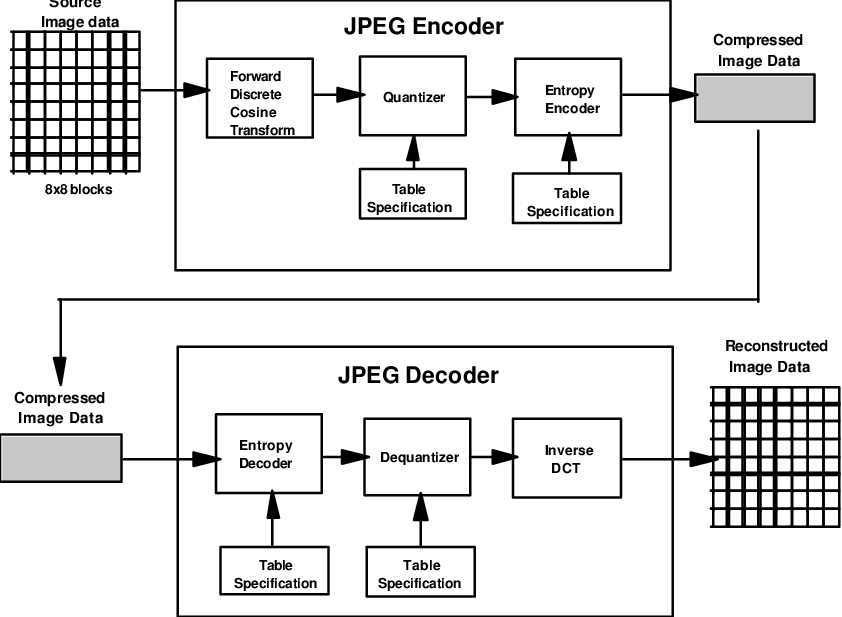
其实 JPEG 的编码还是比较简单的,对原始图片首先进行 离散余弦变换 (Discrete Cosine Transform),然后进行量化,损失一部分信息,但是图像尺寸得到减少,最后进行霍夫曼编码。而解码就是完全相反的过程,先霍夫曼解码,去除量化,最后做个 DCT 反变换就得到原始图像了。
为什么要进行 DCT 变换呢?这也是为了方便后面进行量化,一张图片其实可以表示为下面的 64 种分量组合:

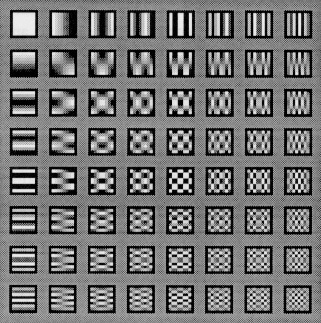
当然,一张图片里并不会同时包含所有的分量,例如纯色背景图左上角的低频分量就会比较多,而右下角的高频分量就会比较少,所以我们在后一步量化的时候,可以量化掉掉图片里的一部分信息,但是图片整体看起来不会有明显的区别。
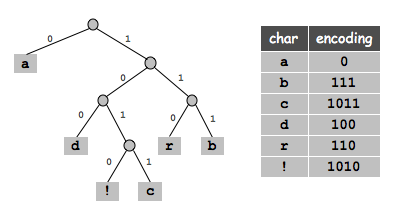
最后的霍夫曼编码,其实是为了压缩存储空间,前面经过量化之后,一张图片的 RGB 值可能性大大减少,比如一张 8x8 纯黑的背景,所有的值都是0,那么我们其实并不需要存储 64 个 0,只要存储 64,0,后面只要按照规则知道这代表 64 个 0 进行解码就可以了。
下面这张图就是霍夫曼编码的直观表示,例如一个字节 a, b, c, d 占的存储空间都是 1 个字节,8 bit,但是一个文件内并不一定会出现 ASCII 码表里所有的字符,经过霍夫曼编码之后,a 可以只用1个 bit 0 表示,b 用 111 一共 3 个 bit 表示,就节省了大量的存储空间。
4. 总结
于是到此为止,介绍了 USB 摄像头的 2 种常见格式 (YUYV 和 MJPEG),前者 YUYV 是未压缩的低分辨率图像,后者 MJPEG 可以实时传输高分辨率的压缩后图像,并说明了如何从 V4L2 文件 /dev/video0 里面读取数据,并进行转码 (YUYV --> YUV3) (YV12 --> YUV3),利用 OpenCV 进行图像处理,随后 JPEG 编码 (DCT 变换 --> 量化 --> Huffman 编码),最后利用定制的 Linux 内核,初始化 USB OTG 为摄像头设备,实时传递篡改后的视频流数据到 PC 端。