Quaternion 与 三维空间旋转
无论是做游戏开发 (Unity3D / Unreal 5)、无人机,还是无人驾驶,相信很多人都听说过 Quaternion (四元数)。
举个例子,无人机如果用 欧拉角 计算旋转姿态,就会像下面左边那样坠机;而使用 Quaternion 的话受到扰动后依旧能恢复平稳。
![Record_2024_11_03_17_02_41_917.mp4 [video-to-gif output image]](https://doc.wuhanstudio.cc/posts/quaternion_rotate/drone.gif)
再举个例子,下面是 Unity3D 和 Unreal 游戏引擎的 API, 只要是关于旋转的 API 都能发现 Quaternion。
# Unity3D
public static Quaternion Slerp(Quaternion a, Quaternion b, float t);
# Unreal
class unreal.Rotator(roll, pitch, yaw).quaternion()
假如你依旧没有听说过 Quaternion,至少听说过欧拉角,例如一架飞机的姿态可以用 roll, pitch, yaw 表示:
虽然欧拉角的 roll, pitch, yaw 看起来非常直观,但是计算旋转矩阵会非常痛苦。不信的话,我们一起欣赏一下欧拉角最简单的绕 x, y, z 轴旋转矩阵的矩阵。如果是绕任意向量旋转,还会更加复杂。
另一方面,使用欧拉角会碰到著名的 Gimbal Lock 问题,也就是下图这样:如果使用旋转矩阵,每当飞机的姿态与某个轴重合的时候,就会突然绕另一个轴旋转,如果无人机出现这个问题当然就是坠机了。
![Record_2024_11_04_19_11_16_497.mp4 [optimize output image]](https://doc.wuhanstudio.cc/posts/quaternion_rotate/gimbal_lock.gif)
-
Quaternion 则可以解决 Gimbal Lock,同时计算也会更简单。
-
Quaternion 有四个维度,分别用虚轴 表示三个虚轴。
-
Quaternion (四元数):
完蛋,一看到虚数,很多人可能就头大,不禁回想起本科 一元分析、多元分析、复分析 的恐惧。于是决定写这篇文章,用动画和图片的方式,直白地演示 Quaternion 怎么用虚数表示三维空间的姿态。
2维虚数: i
首先,我们从最简单的 2维 平面开始,提到虚数很多人第一印象可能就是下面的公式。
都说 平方大于等于 0,怎么还会有 啊?其实我们只需要换个角度,就豁然开朗了。
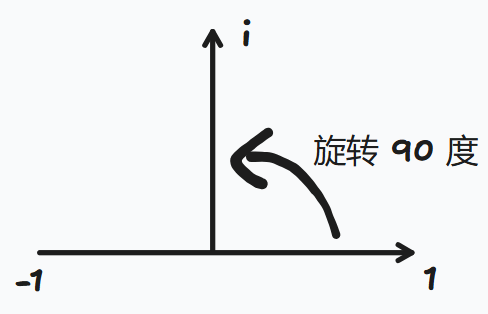
- 我们把 想象成旋转 90°,比如从 1 开始,逆时针旋转 90 °,就成了 ;
- 我们把 继续旋转 90°,就从 旋转到了 -1。
这样是不是理解,为什么 了,每次和 相乘就是旋转 90°。其实就是先从 1 旋转 90°到 轴,再旋转一次就成了 -1 负轴。
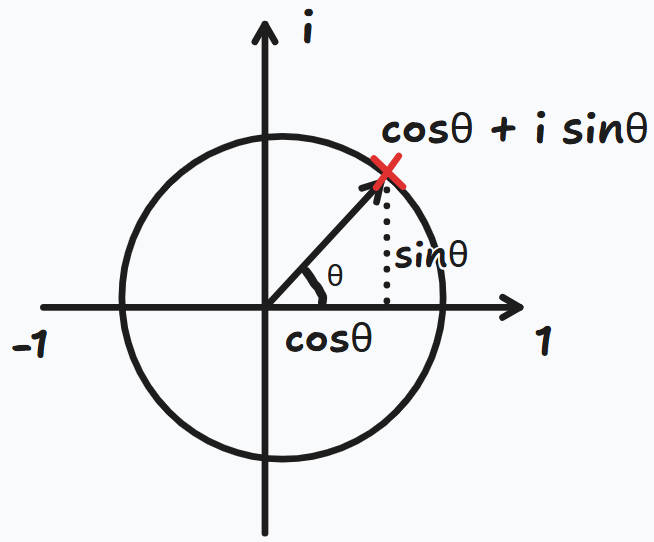
假设我们旋转任意角度 θ,那么单位圆上的任一点就都能用复数表示了:
这样用旋转来理解虚数 ,相信容易了不少,上面的 我们就可以理解成逆时针旋转 。
那么如果我们先旋转 ,再旋转 ,会怎么样呢?相信大家都知道最终角度是 ,但是我们需要证明一下。
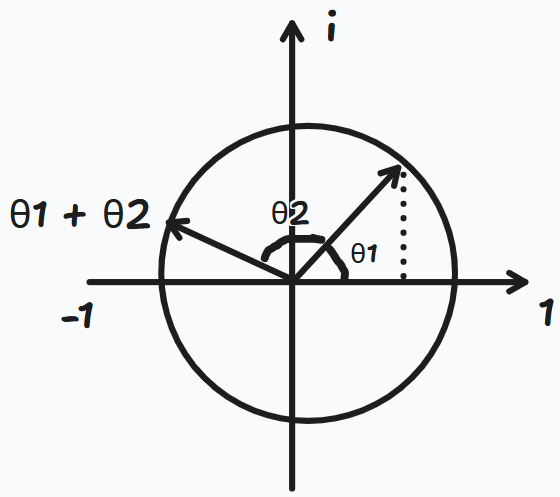
如果我们把复数理解为旋转,两次旋转 则是把两个复数 和 相乘:
- 第一次旋转 :
- 第二次旋转 :
于是,两个复数相乘 ,其实就是旋转角度相加 。一提到乘法等于加法,你可能立马想起来指数 不就是这样吗:
这就是为什么也有人用指数 表示复数旋转:
比如我们先旋转 ,再旋转 ,那么最后的位置就是 。
到这里位置,相信你不再觉得复数 很离谱,很头大了,其实它就是代表二维平面的旋转。
![Record_2024_11_04_19_27_14_705.mp4 [optimize output image]](https://doc.wuhanstudio.cc/posts/quaternion_rotate/2d_quaternion.gif)
四维 Quaternion: i, j, k
前面提到 Quaternion 是四维的,可能一下从二维跳到四维太突兀了,我们先看看三维的情况:
这里说是三维,其实不过是多了个虚轴 罢了,如果我们俯视这个三维的球体,会发现改变 的参数,其实就是在旋转一个二维的单位向量 ,其中 表示单位圆上的点。
![Record_2024_11_04_19_34_46_65.mp4 [video-to-gif output image]](https://doc.wuhanstudio.cc/posts/quaternion_rotate/2d_rotation.gif)
那么我们固定这个二维的向量 ,再改变 是什么效果呢?注意看下面动画圈出来的红色向量,其实改变的就是与这个二维向量的夹角 。如果我们切换到与 垂直的正视图,又看到一个单位圆的旋转了。
![Record_2024_11_04_19_58_29_2.mp4 [optimize output image]](https://doc.wuhanstudio.cc/posts/quaternion_rotate/3d_quaternion.gif)
相信现在你已经理解了 2维、3维的空间旋转,但是别忘了,我们还可以自转呢。于是我们再增加一个维度就有了 Quaternion,其实就是先找到一个三维向量 ,再绕着这个向量旋转 :
还是注意红色箭头圈出来的向量,其实我们改变 () 就是改变这个三维向量在空间里的位置,最后不出意外的话,剩下的 就是与这个三维向量的夹角了。
![Record_2024_11_04_20_08_03_356.mp4 [optimize output image]](https://doc.wuhanstudio.cc/posts/quaternion_rotate/4d_quaternion.gif)
当然,我们还是需要改变 看 Quaternion 是如何绕三维向量 旋转的。
![Record_2024_11_04_20_13_45_604.mp4 [optimize output image]](https://doc.wuhanstudio.cc/posts/quaternion_rotate/quaternion_rotate.gif)
可以看到,果然是绕三维向量 自转。相信你现在已经理解 Quaternion 是怎么表示三维空间姿态的了,以及为什么我们需要四个维度。
当然,你也可以自己去这个网站上体验一下 Quaternion 的乐趣。
- Visualize Quaternion: https://eater.net/quaternions/video/intro
最后,我们看看 Quaternion 的旋转公式,一个向量 绕任意三维向量 旋转 后的向量 ,公式相比欧拉角的旋转矩阵要简单多了,而且也不会有文章开头 Gimbal Lock 的问题,因为 Quaternion 维度更高有四维:
如果你想问,为什么是 ,而不是 可以在这里找到证明过程:Euler-Rodrigues-Hamilton。
https://www.math.stonybrook.edu/~oleg/courses/mat150-spr16/lecture-5.pdf
总结
现在你应当理解什么是虚数,为什么 了,以及我们为什么需要四维的 Quaternion 来表示三维空间的旋转了。Quaternion 不仅旋转公式简单,还不会有 Gimbal Lock 的问题。
另外,也有人用下面的公式表示 Quaternion,只要你还记得单位球的旋转动画,应该能猜到:。
最后顺便一提,Quaternion 的乘法遵循 ,如果我们把两个 的 Quaternion 相乘会发现很有意思的事情:
-
最后结果的实部 ,不就是负的向量内积吗?
-
最后结果的虚部 ,则是向量的外积。
现在你可能理解为什么向量的内积是一个数值 (实部),向量的外积是一个向量 (虚部 ) 了,其实内积和外积,是源自于更高维度的 Quaternion 乘法。