g-h 滤波器 与 PID 控制 (Filter & Control)
之前的一篇文章介绍了 互补滤波器 (Complementary Filter),并演示了如何从 IMU 原始数据,用互补滤波器得到更准确的 加速度 和 旋转角速度 (核心算法的代码就 7 行)。

在理解了最简单的 互补滤波器后, 就可以进一步了解稍稍高级一点的 滤波器(也有人称为 滤波器)。
滤波器 和 P I D 控制 高度相似。
当然,最受欢迎的滤波器当属 阿波罗 (Apollo) 登月计划闻名的 卡尔曼滤波器 (Kalman Filter),但是要理解 Kalman Filter 需要一些理论背景,我会尝试从 互补滤波器, Filter,再到 Bayesian Filter,循序渐进到 Kalman Filter 。
- 简介滤波器
- 互补滤波器 (Complementary Filter)
- 滤波器
- 贝叶斯滤波器 (Bayesian Filter)
- 卡尔曼滤波器 (Kalman Filter)
简介 滤波器 (Filter)
想起来还没介绍 什么是 滤波器 (Filter)?
每当提到滤波器,可能很多人脑海里就会有这样一张图:一条皱皱巴巴的曲线,在滤波后变得光滑。
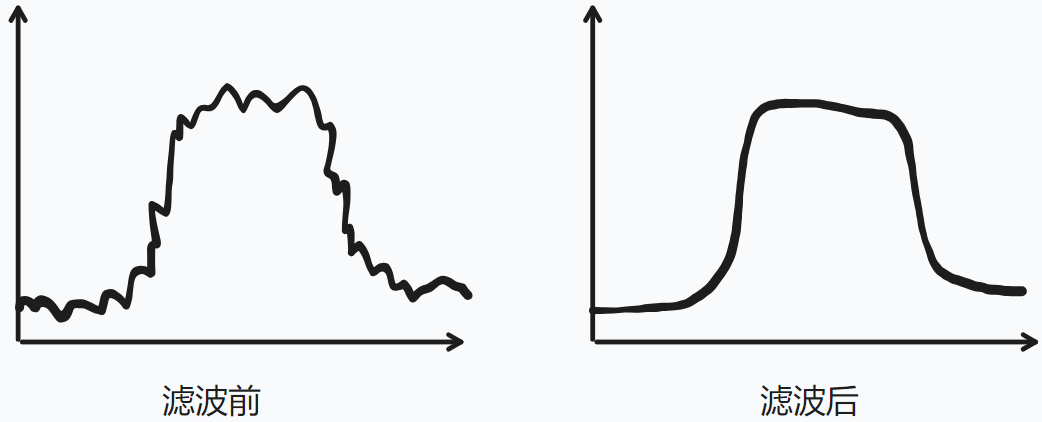
虽然这个例子很形象地告诉我们:各种传感器信号都是有噪声的,滤波器就是为了过滤掉这个噪声。但是这个例子忽略了非常重要的两个概念:预测 (Prediction) 和 测量 (Measurement),这是一个动态的过程。这两个概念可以说贯穿了 经典控制理论 以及 强化学习。
相比之下,我更喜欢另一个经典例子(不过我忘了这个例子的出处)。
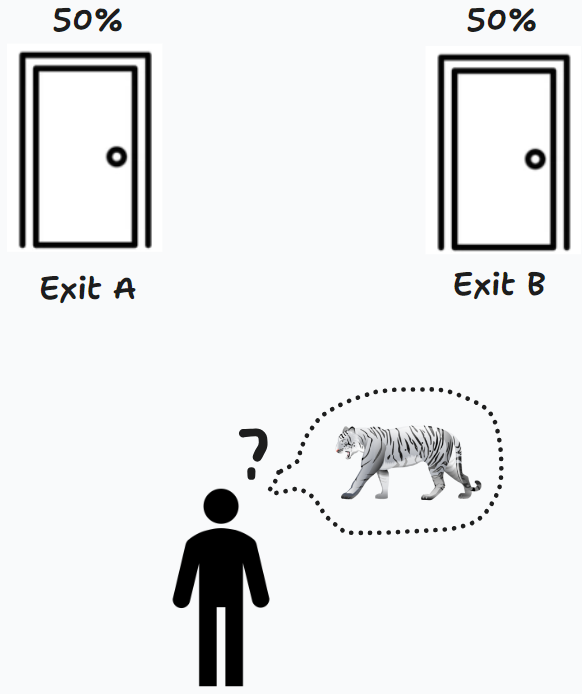
假设你面前有两扇门 A B,一扇门是安全出口,而另一扇门的背后有一只老虎,你不得不选择一扇门离开。
然而很不幸,你提前没有任何信息,无法预测老虎在哪一扇门的背后,于是只能说每一扇门后面都有 50% 的概率是只老虎。(A: 50%,B:50%)
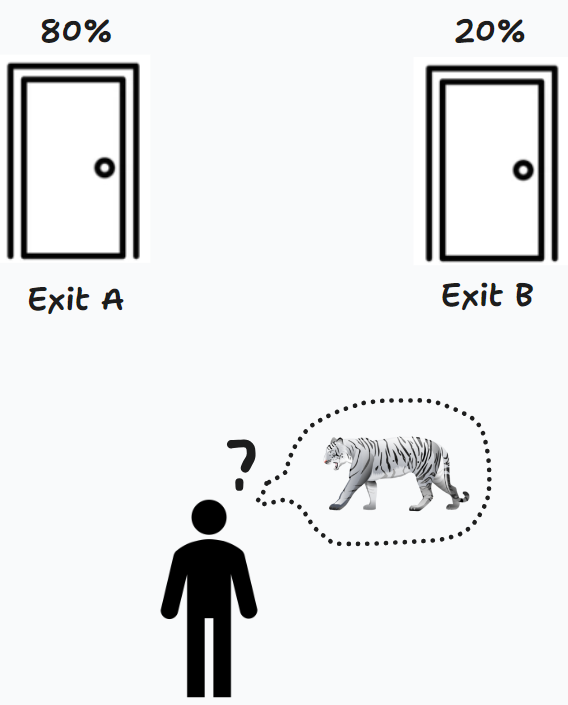
然而幸运的是,你有一双耳朵,可以偷偷听一听门背后的声音,并且你听到 A 出口后面传来了一声虎啸,这个时候你感觉 A 出口很危险。
然而不幸的是,两扇门太近了,耳朵也可能会听错,假如有 80% 概率听对,20% 的概率听错。在经过耳朵测量 (Measurement) 后,你更新了自己的 估计 (Prediction),两扇门后有老虎的概率分别是 A: 80%,B: 20%。
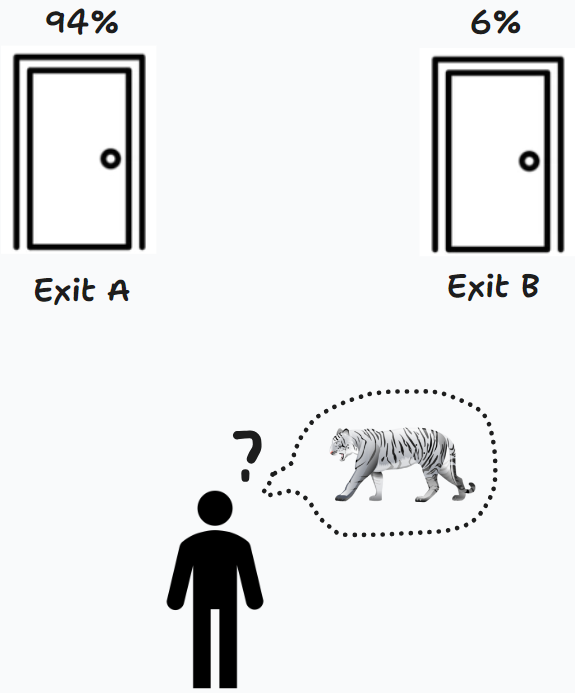
生命只有一次,以防万一,你又偷听了一次,这次又听到 A 出口后传来吼叫声。
由于只有一个门后有老虎:假设老虎在A后面,两次听对的概率 0.8 * 0.8 = 0.64;假设老虎在B后面,两次听错的概率 0.2*0.2 = 0.04。
这里我们认为两扇门不互通,老虎不能随意移动,所以只有上面两种情况。不存在第一次听对,第二次听错(老虎一开始在 A,第二次跑去了 B)
这个时候你更新了自己的估计,两只门后有老虎的概率分别是:
- A:0.64 / (0.64 + 0.04) = 0.94
- B:0.04 / (0.64 + 0.04) = 0.06
两次观测后,这下你有 94% 的概率相信老虎在 A 后面了,于是大胆地从 B 出口离开了。
这个例子告诉我们 观测 (measurement) 的重要性,每一次偷听门后的声音,我们就对老虎的位置有了一个新的 估计 (Prediction)。滤波其实就是这样一个动态的过程:在反复的观测中,不断更新自己的估计。
但是现实世界的传感器都是不完美,有噪声的。比如你非常耳背,只有 60% 的概率能听对,有 40% 的概率会听错,这个时候如果你两次听到 A 门后传来了声音,你的估计是:
- A:0.36 / (0.36 + 0.16) = 0.69
- B:0.16 / (0.36 + 0.16) = 0.31
你可能就需要多观测几次,直到对当前的状态有一个比较准确的估计。
当然,这个例子过于简单,我们假定了当前的状态是固定的:老虎不会移动。一旦系统的状态会改变,例如我们预测气温的变化,一辆汽车的位置,就需要 g-h 滤波器 (Filter) 来动态地更新自己的估计了。
g-h Filter
前面老虎的例子,主要是为了体现反复观测 (measurement) 的重要性,这样传感器 (sensor) 即使有测量误差,我们也可以通过反复测量,越来越接近真实值。比如下面这张图,假如房间温度几乎稳定不变,我们连续采样50次取平均值,哪怕测量值一直在抖动,最后我们计算的平均值几乎和房间实际温度一样了,这就是传说中的均值滤波。
那么问题来了,现实世界是一个动态的过程,面对一个反复横跳的老虎,或者正在加热的水壶,我们测量是需要花时间的,每次测量完,老虎的位置、或者水温就变了,那我们要怎么 动态地 追踪老虎的位置或者水温呢?
滤波的两个重要组成:预测 (Prediction) 和 测量 (Measurement)
-
一种解决办法是 加强测量,例如之前文章提到的 互补滤波器 (Complementary Filter),我们可以多放几个传感器,这样同一时间有好几个传感器的数据,把它们测量数据以一定比例结合起来,就比一个传感器精确多了。
-
另一种解决办法是 加强预测,毕竟我们也不能盲目相信传感器,测量再多次也都是有噪声的,于是我们需要引入物理模型,大概预测未来可能的测量值。比如老虎会横跳,但不会瞬间移动(至少现在的科技不太行),所以 ,路程=速度*时间,我们大概就可以预测老虎未来可能的位置了。
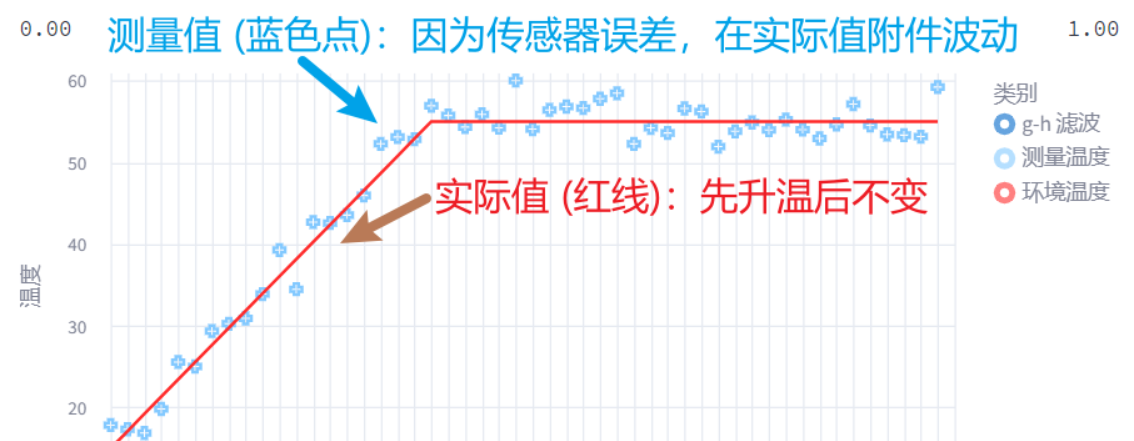
再比如下面这张图,每一个点代表一个温度测量值,虽然传感器噪声很大,但是我们大致可以看出来温度是线性升高的,这样我们就可以用一个线性模型来大致预测下一秒温度范围了。
老虎的例子突出测量 (Measurement),接下来突出预测 (Prediction),这样滤波的两个核心就完整了。
现在开始正式介绍 g-h 滤波的算法了,这里先给出完整算法,其实就三行:
如果看不懂,别急,接下来会拆开来一步步解释。
第一步:预测 (Prediction)
首先,高中物理知识,我们可以通过当前时刻温度 ,和上一个时刻的温度 ,计算出来变化速度 :
这样还可以推算出来,下一个时刻的温度 :
这也就是前面提到的,g-h 滤波引入的物理预测模型,是不是非常简单。
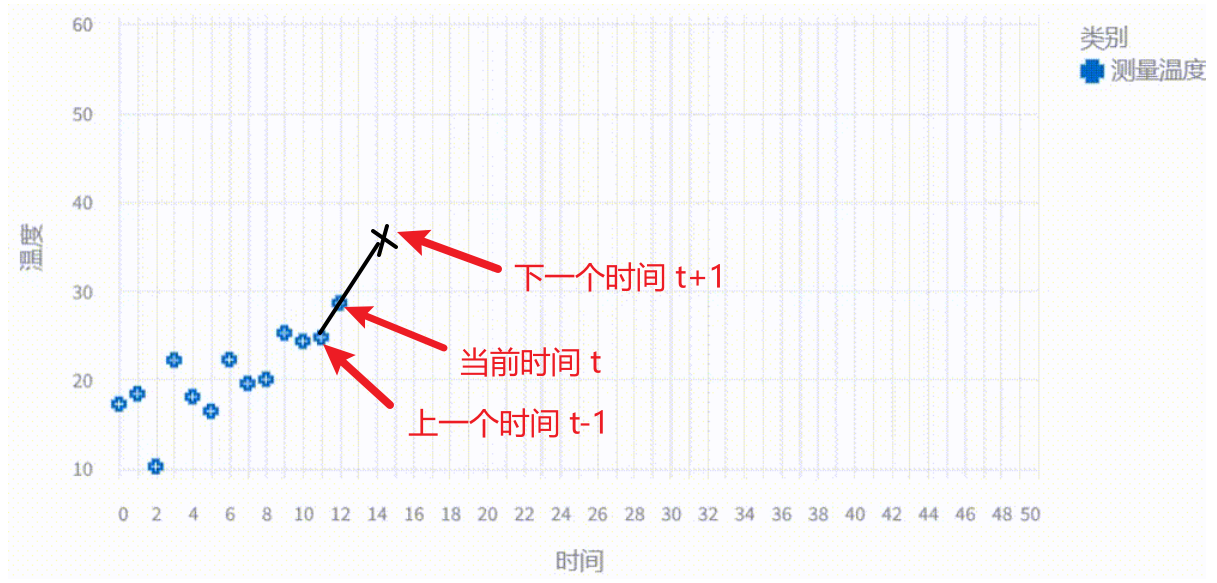
第一步的公式是不是就能看懂了,如果我们知道当前时刻估计的温度 ,就能根据速度 来算出下一时刻的预测值 。
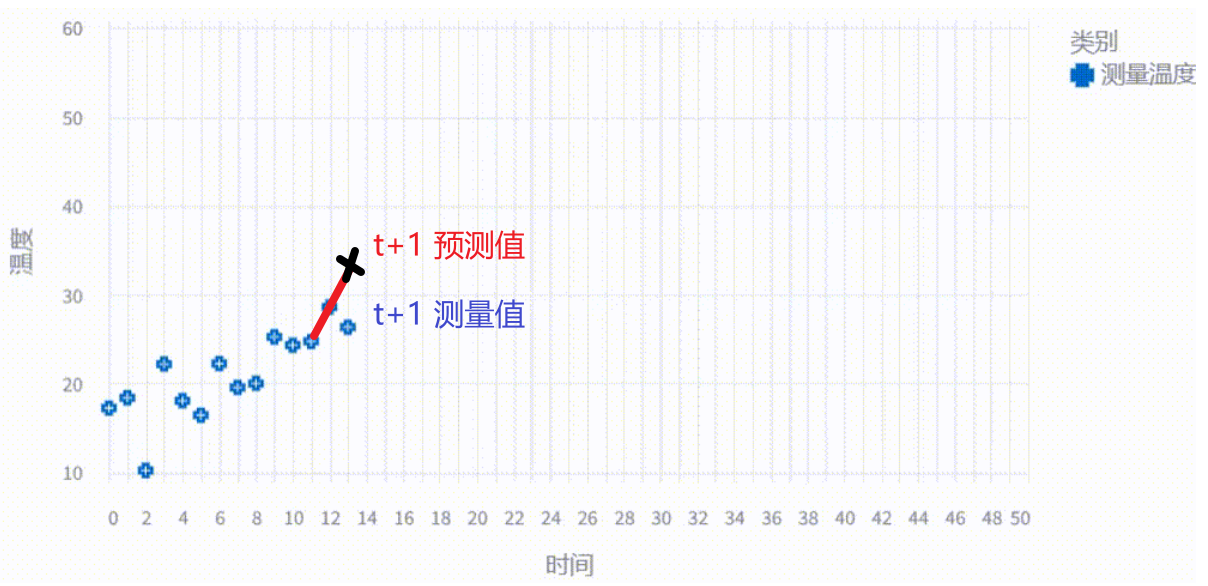
这里需要注意的是, 是模型预测值 (Prediction), 上面是个波浪号,然而物理模型的预测并不一定和实际吻合,所以我们还需要第二步,把模型预测值和实际测量值结合起来,得到滤波器最后的输出:估计值 (estimation) ,这里 上面是小三角。
读作 tilder,代表模型预测值; 读作 hat,代表预测和测量结合,最终给出的估计值。
第二步:更新位置 (Update) - 参数 g
那么,我们怎么计算最终的估计值 呢?
其实很简单,我们现在手上有物理模型的预测值 和 实际测量值 ,只需要像互补滤波器那样按比例组合就可以了。
这简直就和互补滤波器一模一样,只不过互补滤波器结合的是两个传感器数据,而 g-h 滤波器结合的是模型预测值,和实际测量值。
- 当 的时候, ,估计值=预测值,我们完全相信物理模型的预测值,直接忽略测量值;
- 当 的时候, ,估计值=测量值,我们完全相信下一个时刻的测量值,忽略物理模型。
- 当 在 (0, 1) 之间的时候,我们结合物理模型和测量值,得到更准确的结果。
当然,为了区分 g-h 滤波 和 互补滤波器,有人也喜欢把公式换个形式:
这样看起来更清爽,测量值和模型预测会有偏差:,就不考虑偏差,相信预测;,就记入全部偏差,相信测量。
相信 g-h 滤波器的第二步公式,你也能很轻松理解了:
你可能说到这里 g-h 滤波器不就结束了吗?滤波器的估计值 已经算出来了呀,怎么还有个参数 呢?
第二步:更新速度 (Update) - 参数 h
不知道你还记不记得,前面我们模型是根据变化速度 来给出预测的,然而 是动态变化的,我们还没有更新速度呢。
这里的系数 其实就是调整速度的更新,如果测量值 和模型预测 不一样,说明速度可能变了,我们要赶紧更新速度:
- 我们就不更新速度,认为系统速度不变;
- 如果我们认为系统速度变化很大,例如反复横跳的老虎,就把 设置大些;如果我们认为系统速度变化不大,比如行驶的火车一般不会急加速、急停, 就可以小一些。
到这里,g-h 滤波器的三个公式,你应该都能理解了:
还剩下最后一个问题,怎么去选择 和 参数的大小呢?
g-h 参数选择
文章开头的时候,我说 滤波器和 PID 控制很像,现在你应该理解了,毕竟 和 分别代表位置和速度,刚好类似比例系数 P 和微分系数 D,并且 PID 控制的乐趣就在于调参,接下来我会介绍怎么调节 和 。
这里你可能灵光一闪,我们没有考虑加速度啊?恭喜你如果早出生几年, 滤波器就是你提出来的了。
假设我们加热水壶,水温先逐渐上升,最后几乎稳定不变,我们要怎么调节 参数去动态估计水温呢?
情况1:g=0, h=0 (完全相信模型,速度不变)
首先,我们看一下如果 ,,那 滤波器会画出怎样的估计曲线呢?
你也可以先根据公式,自己思考。我故意放公式和大图在这里,答案在这下面。
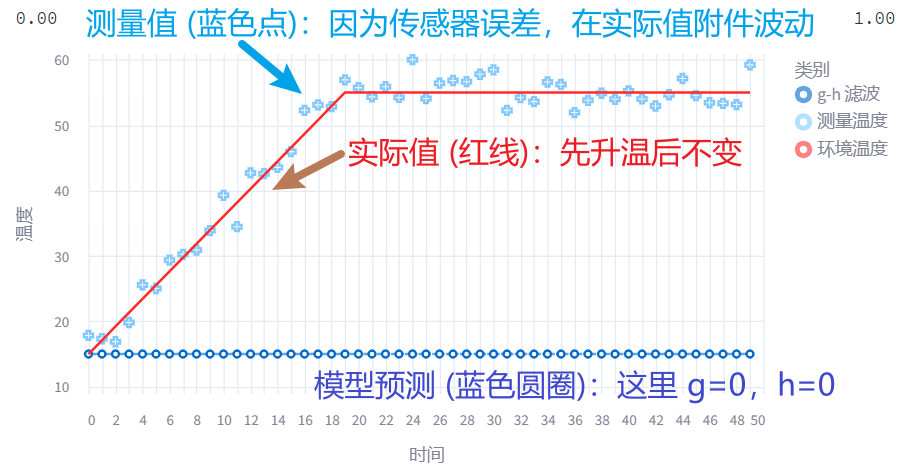
经过思考,不知道你是不是得出和我一样的结论, 滤波器会画出一条直线。
- g=0,说明我们完全相信模型预测值,完全不考虑传感器的测量值;
- h=0,说明我们认为系统速度不变,也就是水温改变速度始终和最开始一样,由于最开始 的时候,我们不知道速度,只能设置 ,后面 于是水温一直不变。
最终, 不管传感器测量结果是多少,都估计水温和最开始一样不变,就画出了一条直线。
这里顺便一提,除了初始速度 , 滤波器需要你指定一个初始值 ,也就是最初的水温。如果你知道初始值当然最好,不知道的话 就行了,后面 滤波器会根据测量值,逐渐逼近真实水温的。
情况2:g=0, h≠0 (完全相信模型,改变速度)
如果我们还是相信模型,但是 呢?
- 说明我们完全相信模型预测,根本不受测量值的影响;
- 调整的是模型的速度更新快慢,由于我们完全相信模型预测, 就很重要了。
现在我们固定 ,把 由小逐渐增大看看效果。
- 的时候,速度更新非常缓慢,后面温度不变了, 滤波器的速度调节太慢,出了一个缓慢调节的正弦曲线。
![2024_10_21_12_09_15_669.mp4 [video-to-gif output image]](https://doc.wuhanstudio.cc/posts/gh_filter/g0h006.gif)
- 的时候,速度又更新太快了,导致滤波器输出反复震荡,画出了一个高频震荡曲线。
![2024_10_21_12_14_34_346.mp4 [video-to-gif output image]](https://doc.wuhanstudio.cc/posts/gh_filter/g0h08.gif)
所以当你的滤波器震荡的时候,可能就是 的范围没有设置好了,这也非常类似 PID 控制的 微分项 D。
情况3:g=1, h≠0 (完全相信传感器)
同样,你也可以先自己思考一下:
- 说明我们完全相信测量值,根本不受模型预测的影响;
- 调整的是模型的速度更新快慢,然而 不考虑模型了,说明我们无论怎么调节 都没区别。
可以从下面的动画看到,无论我怎么调节 ,滤波器给出的估计 (蓝色圈圈) 和测量值始终一模一样。
![2024_10_21_11_58_11_484.mp4 [speed output image]](https://doc.wuhanstudio.cc/posts/gh_filter/g1hn.gif)
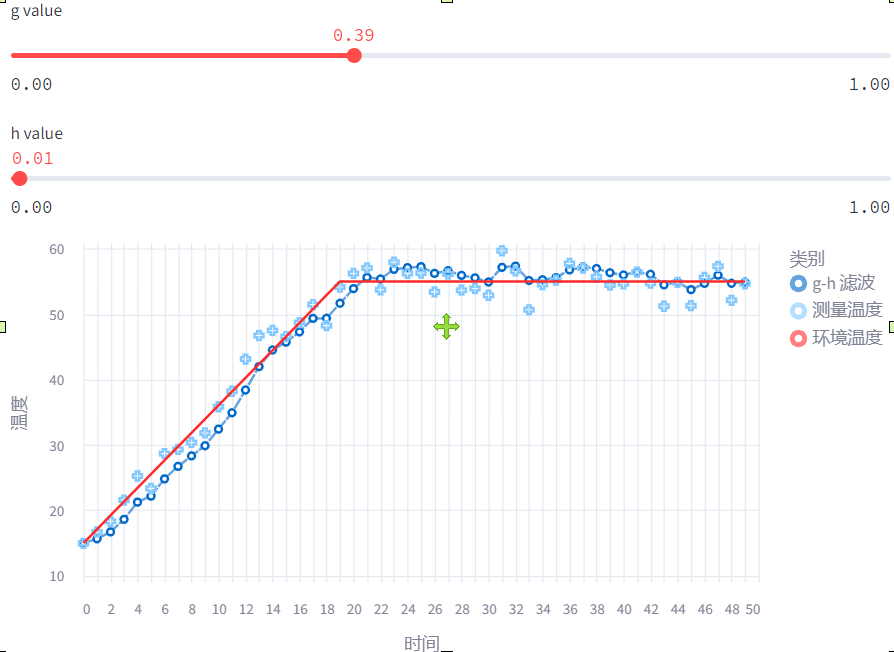
情况4: g=0.39, h≠0.01 (结合模型和传感器)
现在你应该感受到 参数调节的重要性,在经过多次调节后,才能找到比较合适的参数。
然而不幸的是,同一组参数并不能适用所有的系统,比如下面如果温度逐渐加速升高,可以看见同样的 参数,我们的估计总是滞后实际的温度的。
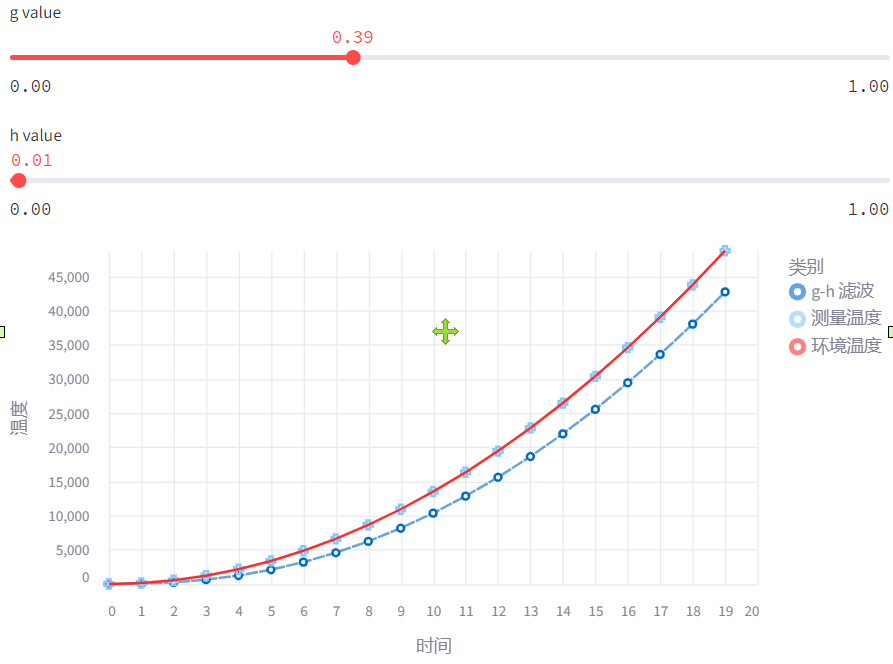
这里一方面是 滤波器没有考虑加速度,你可以尝试升级 滤波器,或者有没有什么办法能动态地调节 参数呢?没错,这就诞生了大名鼎鼎的 Kalman Filter 了。
总结
最早,互补滤波器一行公式结合了2个传感器的数据。
后来, 滤波器用类似的公式,结合了物理模型和传感器数据,但是需要手动调节参数。
再后来,Kalman 滤波器自动调节参数,更加灵活。
如果你想自己体验调整 g-h 参数的乐趣,也可以在下面这个网站上尝试,文章里的动画其实就是录制的这个网站: