Buildroot 定制嵌入式 Linux (树莓派 4)
Buildroot 定制 Linux 内核固件,添加自己的软件包,以及自动初始化程序
0. 为什么需要 树莓派 4
作为各种 Linux Pi 开发板 (Nano Pi,香蕉派,香橙派,芒果派,荔枝派)的始祖,树莓派一直以来都是以简单好用、性能强大,以及供电不足而闻名。
即使是完全不了解 Linux 的人,也可以把 树莓派4 当作一个便携式电脑使用。然而,树莓派的芯片是 Broadcom 定制的,只能用作生产树莓派,所以不像 Arduino 那样出现了各种山寨版,树莓派非常成功地保留了正版,只是催生了各种其他水果派:水果的名字如今都快被用完了。
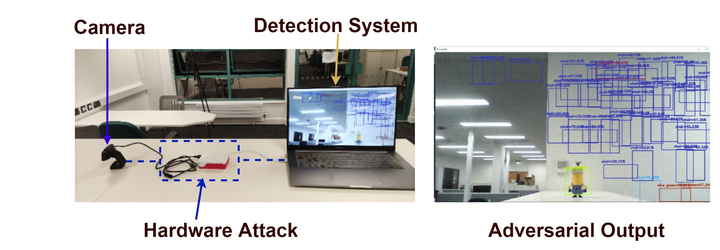
最近需要 树莓派4 是因为之前一个科研项目,用 树莓派4 攻击目标识别,需要读取 V4L2 的视频流,用 OpenCV 解码、篡改、编码、转发,再利用 USB Gadget 模拟一个虚拟摄像头。这些代码是用 C/C++ 访问的底层硬件,在 Linux 内核的 DWC3 驱动做了一些改动后,原来的程序无法使用了,而相关的 Linux 驱动还在更新中,所以决定先固定 Linux Kernel v5.10。
这个项目没有用其他开发板,是因为模拟摄像头需要用到 Linux 的内核驱动 UVC Gadget,虽然 Allwinner 的 Linux 开发板性价比很高,但是 Allwinner 的 H2,H3,H5+ 芯片内部的 USB IP 似乎是精简的,不支持 UVC Gadget。之后又陆续尝试了 RockPi,Zynq,i.MX 6,树莓派 0/3/4,只有 树莓派 0/4 和 I.MX 6 的 UVC Gadget 是可以使用的。考虑到实时攻击的性能,也为了方便其他人重复实验,最终选择了树莓派 4。
0. 为什么需要 Buildroot
虽然树莓派官方的 Raspberry Pi OS (Raspbian) 很好地支持了定制芯片,但树莓派芯片的一些非常规操作,例如上电先由 GPU 初始化系统,由 GPU 从 ROM 读取系统引导,再把所有权交给 CPU,给硬件开源移植带来了一些麻烦。
另一方面,我需要固定 Linux Kernel v5.10,不幸的是,树莓派官方的 Raspi OS 内核、固件更新还算挺快的,最新的 Raspi OS 已经紧随 Linux Kernel v6.1 的步伐了,定期适配不同驱动版本还是挺头疼的,于是打算定制一个可以自己控制的轻量级嵌入式 Linux。
当然,除了官方的 Raspbian,我们也可以用嵌入式 Linux 非常好用的 Armbian,但是他俩系统镜像都需要几个GB,如果我们需要更加轻量级的 Linux 系统,还得依赖 Buildroot / Yocto。
一个完整的嵌入式 Linux 需要包括 Bootloader (引导),Kernel (内核) 和 rootfs (根文件系统),如果自己从头编译所有部件再组合,还是挺麻烦的。Buildroot 可以用一行命令 make 自动完成编译,并打包成一个 sdcard.img,非常方便。
接下来会介绍,如何用 Buildroot 定制一个轻量级的 Linux,选择自己需要的 Linux Kernel 版本,并且修改根文件系统 (rootfs),集成自己的软件到 Buildroot 软件包,并且开机自动启动。
1. 安装 Buildroot
首先,Buildroot 本身已经支持 树莓派4 了,我们需要做的是在这个基础上定制。
$ git clone https://git.buildroot.net/buildroot
一般来讲,不建议使用 latest 源码,而是用一个 release 版本,所以我们切换到 2023.02 分支:
$ cd buildroot
$ git checkout 2023.02
在 buildroot 的 configs 目录里,我们可以看到所有已经支持的开发板,这里我们使用 树莓派4 的默认配置:
$ make raspberrypi4_64_defconfig
接下来就可以一行命令编译,通常会花费 30-60 分钟:
$ make
这样我们就可以看到在 output/images/ 目录下有一个 sdcard.img 可以烧录到 SD 卡启动。
sudo dd if=output/images/sdcard.img of=/dev/sdb
到这里为止,我们就用 Buildroot 给 树莓派4 构建了一个完整的嵌入式 Linux (≈150MB),接下来介绍如何开始自己的定制。
2. 修改 Linux 内核
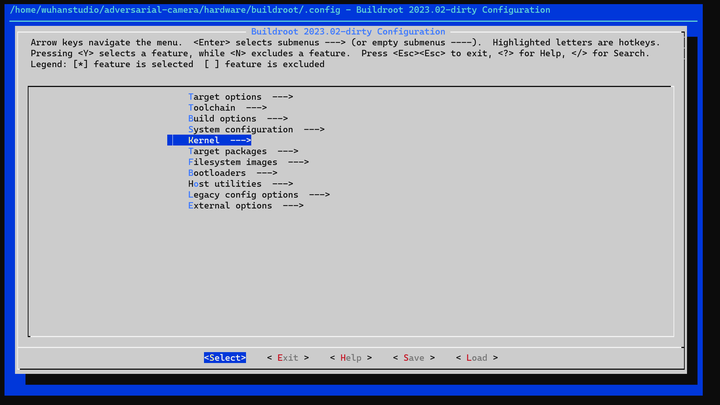
Buildroot 提供经典的 menuconfig 图形界面:
$ make menuconfig
在 Kernel 选项里,我们可以指定 Linux Kernel 的版本。
比如,我们可以指定 Linux 某个 Git Commit 的 hash,这样 Buildroot 就会下载编译对应的内核源码。
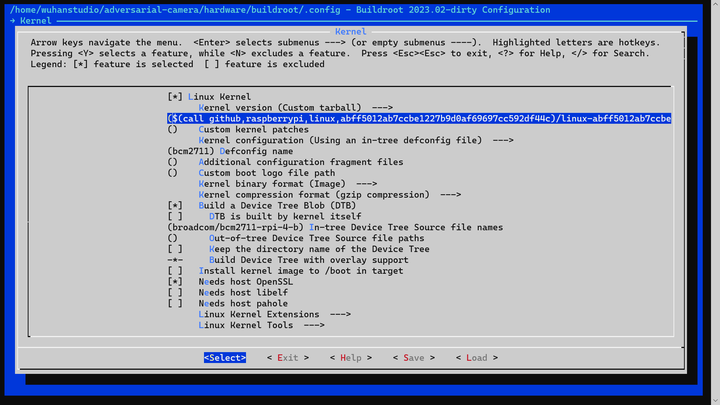
如果需要进一步配置 Linux 内核,例如添加对 USB Gadget 的支持,我们可以使用 linux-menuconfig 命令:
$ make linux-menuconfig
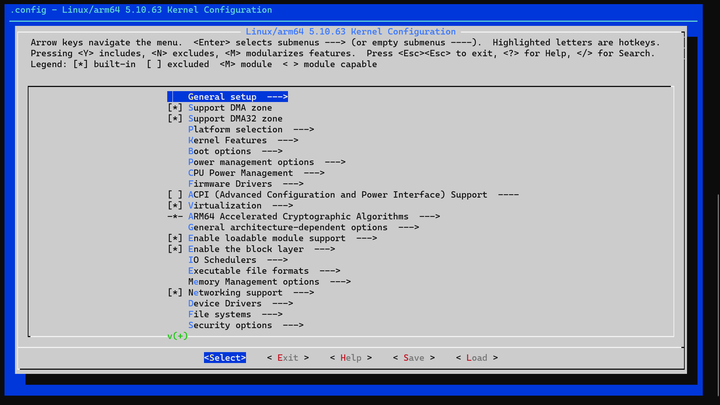
这样,我们就可以详细配置 Linux 内核。
到这里为止,其实都算比较轻松,因为我们并没有修改任何 Buildroot 的源码,只是利用别人现成的工具,修改配置而已。接下来会介绍,如何在不需要大量改动 Buildroot 源码的情况下,更加优雅地集成自己的软件包。
3. 修改默认软件包版本
我的项目需要 OpenCV 4.5.3 和 rpi-firmware 软件包的特定版本,但是 Buildroot 并不可以选择软件包的版本,我们需要修改 buildroot/package 目录下对应软件包的配置源码,来切换软件包版本,好在这也并不复杂。
例如 OpenCV4 目录下有3个文件:
package/opencv4/
├── Config.in # menuconfig 图形界面配置,类似 KConfig
├── opencv4.hash # 保存软件包源码 tar.gz 的 hash,用于下载校验
└── opencv4.mk # 定义软件包版本,一些编译选项和宏定义
好在 OpenCV4 相近版本的编译系统差距并不大,我们可以直接修改 opencv4.mk 里的软件包版本:
OPENCV4_VERSION = 4.5.3
OPENCV4_SITE = $(call github,opencv,opencv,$(OPENCV4_VERSION))
OPENCV4_INSTALL_STAGING = YES
这样 Buildroot 就会自动从 github 上面拉取对应版本的源码包进行编译。当然,我们也需要添加对应版本源码的 hash 到 opencv4.hash 文件里,用于文件校验:
# Locally calculated
sha256 77f616ae4bea416674d8c373984b20c8bd55e7db887fd38c6df73463a0647bab opencv4-4.5.3.tar.gz
sha256 cfc7749b96f63bd31c3c42b5c471bf756814053e847c10f3eb003417bc523d30 LICENSE
上面的 sha256 其实可以自己下载对应的源码,然后在自己本地电脑上计算出来:
$ sha256sum ~/Downloads/opencv-4.5.3.tar.gz
同样,我们也可以修改 rpi-firmware 的软件包版本,不过区别是,除了可以用 tag 的版本号,我们也可以直接指定对应 commit 的 hash:
RPI_FIRMWARE_VERSION = e2bab29767e51c683a312df20014e3277275b8a6
RPI_FIRMWARE_SITE = $(call github,raspberrypi,firmware,$(RPI_FIRMWARE_VERSION))
RPI_FIRMWARE_LICENSE = BSD-3-Clause
这样 Buildroot 编译出来的系统就会带有指定版本的软件包。
虽然我们这一步修改了 Buildroot 的源码,但是修改其实并不多,所以我选择用 patch 的形式保存修改,以后下载 Buildroot 源码后,apply 对应的 patch 就可以了。
$ git diff > ../buildroot_rpi_firmware_opencv4.patch
$ git apply ../buildroot_rpi_firmware_opencv4.patch
Buildroot 修改内核配置,和修改已有软件包的版本,需要做的修改并不多,我们只需要保存 menuconfig 配置文件,和一个小 patch 就可以了。
但是,接下来需要修改 rootfs 和添加新的软件包,就需要做比较大的改动。我们并不希望因为这些改动就在 Github 仓库里保存整个 Buildroot 的源码,一个比较优雅的做法就是在单独的目录里维护自己项目的配置,称之为 Buildroot External Tree。
4. 定制开发板 External Tree
在 Buildroot 的官方文档里也有介绍,如何自定义自己的 Buildroot 项目,只要对 Linux 构成比较熟悉,实际操作起来也并不复杂。
4.1 文件结构
我们可以在 Buildroot 文件夹外面,建立一个单独的文件夹,用 Git 管理自己项目相关的配置,而不需要保存整个 Buildroot 源码,这是我们需要建立的文件结构:
/my_br2_tree/
+-- board/
| +-- <company>/
| +-- <boardname>/
|
+-- configs/
| +-- <boardname>_defconfig
|
+-- Config.in
+-- external.mk
+-- external.desc
- board: 修改根文件系统的配置 (overlay),例如添加一些开机启动的 service
- configs: 保存修改了 Linux Kernel 的配置文件为 raspi4_minm_attack_defconfig
# 创建项目文件夹
$ mkdir buildroot-external-raspi4
$ cd buildroot-external-raspi4
$ mkdir configs # 项目配置列表
$ touch Config.in # menuconfig 配置选项
$ touch external.mk # 项目编译选项
$ touch external.desc # 项目介绍
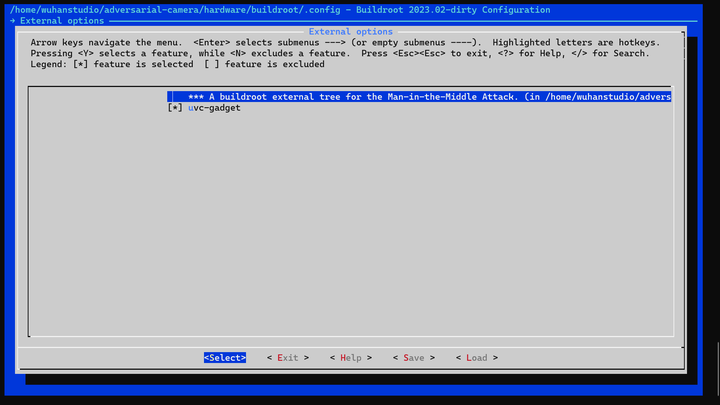
在 external.desc 里面保存项目相关的介绍,其中 name 是区分大小写的,一般都用大写。:
name: RASPI4_MINM_ATTACK
desc: A buildroot external tree for the Man-in-the-Middle Attack.
添加软件包需要用到 external.mk 和 Config.in,我们可以先使用空白文件,后面需要添加自己的软件包了再配置。
4.2 默认配置 defconfig
这样,我们就可以保存自己前面 menuconfig 手动配置的文件到刚刚创建的 configs 目录。
mcake savedefconfig BR2_DEFCONFIG=../buildroot-external-raspi4/configs/raspi4_minm_attack_defconfig
以后就不需要每次都手动配置 Linux Kernel 版本之类的,可以直接使用保存的默认配置:
# 调用默认配置
make BR2_EXTERNAL=../buildroot-external-raspi4/ raspi4_minm_attack_defconfig
# 编译系统
make BR2_EXTERNAL=../buildroot-external-raspi4/
其实这样我们就已经有了一个最小的 Buildroot External Tree,尽管它只保存了我们的配置文件。
4.3 修改根文件系统配置
通常我们不光需要保存配置文件,还需要对跟文件系统做一些修改,比如添加一些系统初始化的配置。
我们可以把 board/company/overlay/ 目录当作 Linux 根文件系统,在这里做的修改都会被覆盖到编译生成的 rootfs 里。比如下面我们创建了 /etc/systemd/system/piwebcam.service 文件,这样编译输出的根文件系统里,也会有对应的 piwebcam.service 文件,用于配置开机自启动的 service。
当然,我们使用 /etc/systemd/system/ 配置 service 是因为我们在 menuconfig 的 System Configuration / Init system 里面选择了 systemd 初始化系统,如果是使用 busybox 则是修改 etc/init.d 目录。
board/
└── wuhanstudio/
└── raspi4b/
└── overlay/
└── etc/
├── piwebcam/
│ ├── init.sh
│ ├── noise.npy
│ └── usb-gadget.sh
└── systemd/
└── system/
└── piwebcam.service
到这里为止,我们不光保存了自己的 defconfig,还修改了根文件系统,最后需要做的就是添加新的软件包了。
5. 添加新软件包
前面我们把 Config.in 和 external.mk 文件留空了,接下来就会以添加 uvc-gadget 软件包为例添加配置。
首先,我们为新创建的软件包添加目录:
$ mkdir package/uvc-gadget/src/
$ touch package/uvc-gadget/Config.in
$ package/uvc-gadget/uvc-gadget.mk
在 buildroot-external-raspi4/Config.in 文件里,我们可以引用软件包的 Config.in,这样就可以在 meuconfig 界面看到我们的软件包了:
source "$BR2_EXTERNAL_RASPI4_MINM_ATTACK_PATH/package/uvc-gadget/Config.in"
当然,我们还需要在 package/uvc-gadget/Config.in 文件里定义软件包的配置和依赖:
config BR2_PACKAGE_UVC_GADGET
bool "uvc-gadget"
select BR2_PACKAGE_JPEG
select BR2_PACKAGE_OPENCV4
select BR2_PACKAGE_OPENCV4_LIB_HIGHGUI
help
Adversarial Camera package.
https://github.com/wuhanstudio/adversarial-camera
接下来在 external.mk 里面定义项目编译的一些配置,这样就会遍历所有 package 的 *.mk 配置。
include $(sort $(wildcard $(BR2_EXTERNAL_RASPI4_MINM_ATTACK_PATH)/package/*/*.mk))
值得注意的是,上面的变量 $(BR2_EXTERNAL_RASPI4_MINM_ATTACK_PATH) 指向我们的项目根目录 这是 buildroot 自动给我们设置的变量名,因为我们在 external.desc 文件里指定了 name。
最后就是在 package/uvc-gadget/external.mk 里指定自己软件包的编译选项了,主要也是定义软件包版本、依赖和软件源码的位置,下面我们选择了 local 是因为源码保存在本地文件夹,我们也可以设置成从 Github 上拉取源码:
################################################################################
#
# uvc-gadget package
#
################################################################################
UVC_GADGET_VERSION = 1.0
UVC_GADGET_SITE = $(BR2_EXTERNAL_RASPI4_MINM_ATTACK_PATH)/package/uvc-gadget/src
UVC_GADGET_SITE_METHOD = local
UVC_GADGET_DEPENDENCIES = opencv4 jpeg
define UVC_GADGET_BUILD_CMDS
$(MAKE) CC="$(TARGET_CC)" CXX="$(TARGET_CXX)" LD="$(TARGET_LD)" -C $(@D)
endef
define UVC_GADGET_INSTALL_TARGET_CMDS
$(INSTALL) -D -m 0755 $(@D)/uvc-gadget $(TARGET_DIR)/usr/bin
endef
$(eval $(generic-package))
上面的配置里,Buildroot 会通过变量 $(CC) 和 (TARGET_CXX)"。
当然,软件包编译系统的配置,例如 Makefile 和 CMake 是不由 Buildroot 管理的,例如我软件包的 Makefile 没有任何 Buildroot 相关的配置。
CXXFLAGS := -fpermissive -Wno-write-strings -Ofast
LDFLAGS := -g
all: uvc-gadget
%.o: %.cpp
$(CXX) -c $(CXXFLAGS) -o $@ $< -I $(STAGING_DIR)/usr/include/opencv4
uvc-gadget: uvc-gadget.o
$(CXX) $(LDFLAGS) -o $@ $^ -lopencv_videoio -lopencv_imgcodecs -lopencv_highgui -lopencv_imgproc -lopencv_core -ljpeg
clean:
rm -f *.o
rm -f uvc-gadget
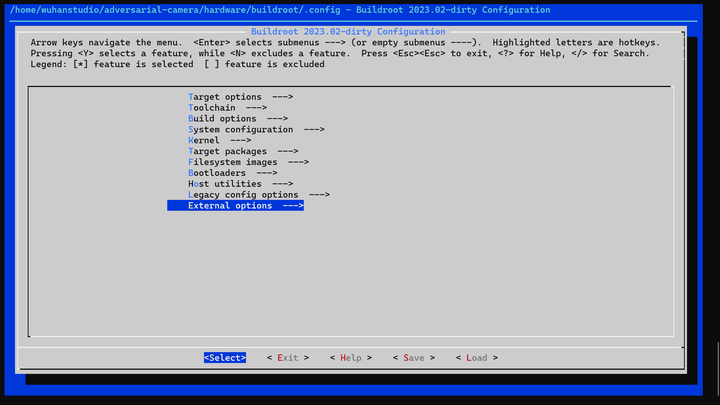
这样我们在 menuconfig 里面选中自己的软件包, make 编译之后就会自动将我们的软件包安装到 Linux 文件系统:
# 修改配置
make BR2_EXTERNAL=../buildroot-external-raspi4/ menuconfig
# 编译系统
make BR2_EXTERNAL=../buildroot-external-raspi4/
最终的系统镜像依旧是输出到 output/images/sdcard.img 里。
总结
这篇文章介绍了,如何下载使用 Buildroot,修改默认软件包版本,修改 Linux Kernel 版本和配置,以及自定义 Buildroot External Tree,和添加自己的软件包到 Buildroot。
- A Man-in-the-Middle Attack against Object Detection: https://github.com/wuhanstudio/adversarial-camera